
 |
RedAlert Project aims to develop a Real-time Early Detection and ALERT system for online terrorist content based on natural language processing social network analysis, artificial intelligence and complex event processing.
Visit RedAlert homepage for further information. |
 |
NKFIH K16: K 119467 Project Collective decision making and collective mission completion with autonomous flying robots K_16 Research Grant of the Hungarian National Research, Development and Innovation Office (K 119467).
|
Research
We are interested in phenomena involving many interacting units ranging from sub-atomic particles through living matter to organisms. In such systems self-organization promotes the emergence of qualitatively new, universal features, including network formation, collective motion, etc. Our research is aimed at uncovering the fundamental principles of the above processes.
 |
Complex networks show universal behaviour from various aspects, characterised by a low average distance, combined with a high average clustering coefficient, anomalous degree distributions and a non-trivial community structure. The new frontiers of network research are focused also on hierarchy, tagged networks and hypergraphs. Our research projects involve in addition general random graph generators and community evolution as well. Visit http://CFinder.org for further information, free software with a manual and data sets. Top ↑ |
 |
The living world provides many fascinating examples of collective motion displaying impressive levels of coordination. We develop special ultra-light, high-resolution GPS devices to track motion of pigeons flying in a flock. Our recent novel method for analysing those tracks revealed a hitherto unsuspected, sophisticated mechanism of group coordination: a dynamical hierarchical organisation within the flock which aids the effective decision-making of the group. We are carrying out new experiments to explore how the flock behaves when its leaders are removed, how individuals' ranks in the hierarchy change when smaller groups are combined into a single bigger flock, and what the relationship is between the airborn hierarchy and the same group's social "pecking order". Top ↑ |
| Building a flying robotic flock from truly autonomous vehicles (UAVs) is a long-standing challenge. In earlier and parallel projects (i) we have obtained expertise about swarming flight from our bird collective motion studies, (ii) we have developed lightweight devices capable of detecting 3D motion in the air and (iii) we have used algorithms of coordinated collective motion extensively. Now we have decided to face the new challenge and build our own flock of flying robots. Top ↑ |
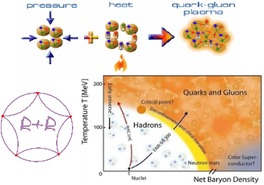 |
The description of the phase transition undergoing in the strongly interacting matter at extreme conditions of high temperature and/or of finite baryonic density requires the application of non-perturbative functional methods. Various techniques for resummation of the perturbative series and different renormalization schemes are investigated in the low energy models of the strongly interacting matter in order to explore interesting aspects of the transition, with relevance not only in particle physics, but also for cosmological or astrophysical studies. Top ↑ |